

Does Splitting & Merging Pix4Dmatic Projects Improve Speed?

Pix4D Matic - Processing Times
In this blog post, we will explore the “Merge Projects” feature in Pix4D Matic. For those of you that are familiar with Pix4D Mapper and how useful and necessary this feature is to calibrate large datasets, you may be wondering if this feature will save you processing time in Pix4D Matic. For this blog, I have processed a sample data set of 7571 x 45MP Images taken with the DJI Zenmuse P1 camera and processed them in 3 projects. The first project has all 7571 images. Projects 2 and 3 have 4196 and 3375 respectively. Let’s dig in!
Introduction
We will explore the Merge Projects feature within Pix4D Matic. This feature is used to merge different Matic projects that have been calibrated with differing calibration settings, either from the list of calibration templates or your choice of custom calibration settings.
Pix4D Matic Processing Options
But one question that comes up is, does “splitting” up large projects into smaller projects that have all processed with the same calibration settings and then merging them speed up processing times? We will dive into the results in this blog post.
Overview of Pix4D
Pix4D is a leader in photogrammetry solutions, originated in Switzerland in 2011, emerging from the prestigious École Polytechnique Fédérale de Lausanne (EPFL) Computer Vision Lab. This Swiss software enterprise is renowned for developing a comprehensive suite of software products. Leveraging advanced photogrammetry and computer vision algorithms, Pix4D's software transforms images from DSLR, fisheye, RGB, thermal, and multispectral cameras into detailed 3D maps and models. With its global footprint, Pix4D operates out of 7 international offices, including its headquarters nestled in the scenic city of Lausanne, Switzerland
Overview of Pix4D Matic
Pix4D Matic’s initial release was in June 29, 2020 with version 1.01 which was compatible with Windows 10 and macOS Catalina. The first stable release was version 1.21 on August 31, 2020.
Pix4D Matic was created to support processing large datasets, such as those resulting from multiple drone flights, by easily handling over 10,000 images without compromising accuracy. This capability positions Pix4Dmatic as a pioneering solution for the future of drone mapping, enabling professionals to achieve high-quality and reliable results even for extensive surveying projects
Comparing Pix4Dmatic with Pix4Dmapper
Pix4Dmapper has long been the standard for photogrammetry software, offering robust processing capabilities and flexibility. However, when it comes to handling very large datasets, it can be time-consuming and resource-intensive.
The “Splitting-and-Merging” workflow for Mapper and Matic are quite different.
Mapper has more literally, a Split and Merge function. In Mapper, this is called “Split into Sub-projects”. You Click Project > Split into Subprojects...
The great thing about this feature in Mapper is that if the images have geolocation, Mapper will automatically split into subprojects based on the maximum number of images you tell it.
If your project has 2000 geolocated images and you select 500 maximum images, Mapper will create 4 subprojects that you run Initial Calibration step on each project and then merge them together.
In Matic, you have to do this Split and Merge manually. You have to plan out your subproject beforehand based on your total image count or data capture folders.
Just make sure you don’t add the same image into to subprojects as you will get an error and will not be able to merge the projects.
Pix4D Matic- Recommended Hardware
The recommended Hardware for Pix4D Matic for Windows:
Windows OS: Windows 10 or 11 (64 bits).
CPU: Intel i7, i9, Xeon, or AMD Threadripper.
GPU: GeForce GTX 10 series, or RTX series.
RAM:
64 GB (2,000-5,000 images at 20 MP).
128 GB (5,000-10,000 images at 20 MP).
Disk Space*:
SSD, 250 GB - 400 GB Free space (2,000-5,000 images at 20 MP).
SSD, 400 GB - 550 GB Free space (5,000-10,000 images at 20 MP)
Recommended Hardware for P1 Images
Based on Pix4D’s recommended hardware for Matic, we can see that Matic can handle up to 5,000 images at 20 MP with 64GB of RAM and up to 10,000 images at 20 MP with 128GB of RAM.
Since we used the DJI P1 at 45 MP, we would like to know what the 20 MP listed images translates to our 45 MP P1 camera.
To do this conversion we use our 20 MP to P1 Camera Calculator.
Using the calculator we find that:
5000 images at 20 MP = 2222.22 Images at 45 MP (P1 Camera). This equals 100.00 Gigapixels
10,000 images at 20 MP = 4444.44 Images at 45 MP (P1 Camera). This equals 200.00 Gigapixels.
Processing Hardware Used for Test:
In our test project, we used a total of 7571 P1 images which equals = 340.70 Gigapixels and is equivalent to 17, 035 images at 20 MP.
Since our test machine running the Matic test only has 64GB of ram, this is a perfect scenario to test if splitting and merging the Calibration step of the processing will save time or if its better to process all images at the same.
Computer Specs:
CPU: 13th Gen Intel(R) Core(TM) i9-13980HX
RAM: 63.63 GB
GPU: NVIDIA GeForce RTX 4080 Laptop GPU
Operating System: Windows 11 Image
Project Settings
CRS: WGS 84 - EPSG:4326
Project CRS: WGS 84 / UTM zone 17N - EPSG:32617
Calibration Template: Flat scene low texture Pipeline Low texture planar
Pix4D Matic Version: Version 1.5.7
Methodology
Drone Capture:
The sample mapping project site was 1700 acres of land with both deciduous and coniferous trees. Since this project was captured here in Ontario, Canada in early March 2024, the deciduous tree were bare, without leaves. With many areas still having snow on the ground, the mix of bare trees with thin branches and snow covered ground makes it particularly difficult to calibrate and process a good 2D ortho.
The mission was split into 5 sections for a total of 7571 images.
Matic Processing:
We created 3 separate projects in Matic.
Project 1 = All the images from all 5 sections = 7571 images.
Project 2 = Images from Section 1, 2 & 3 = 4196 images.
Project 3 = Images from Section 4, 5 = 3375
Each project was calibrated with the exact same settings:
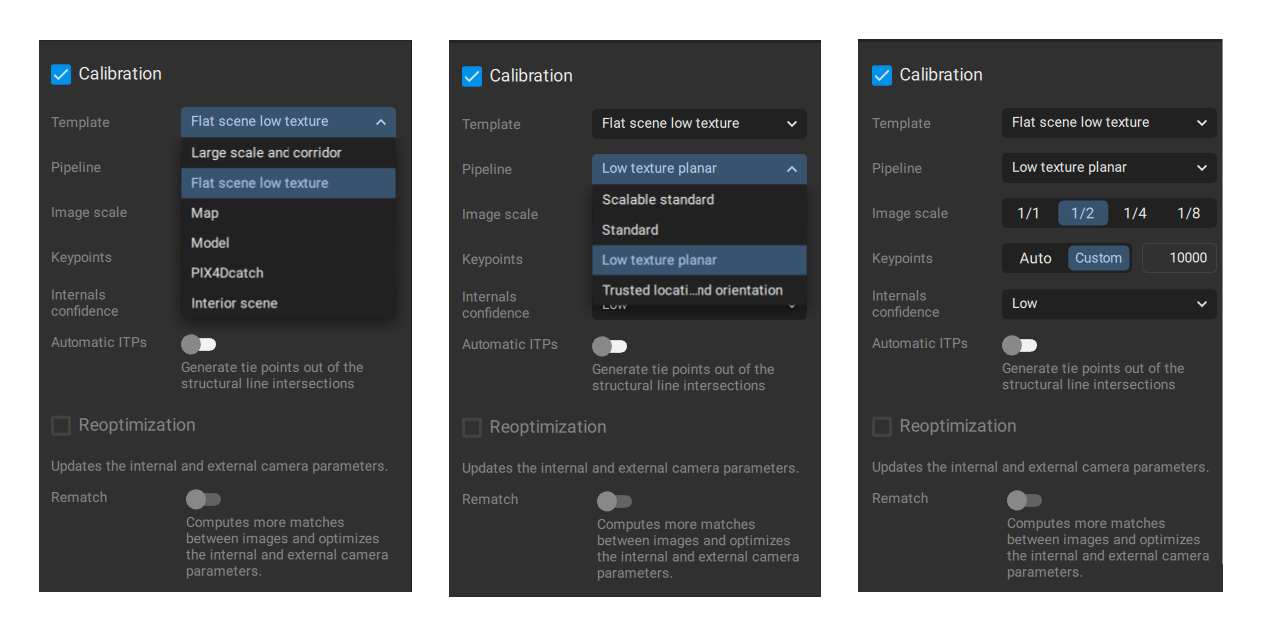
Pix4D Matic Calibration Settings - Flat Scene Low Texture - Low Texture Planar
We wanted to run this test at full 1/1 image scale, however because the nature of the homogenous terrain that was mapped, running at 1/2 images scale resulted in a much better point cloud and 2D ortho as a result of the image scale calibration setting at 1/2.
Processing Results
The processing times for each project are:
Project 1 = 1:35:48
Project 2 = 00:44:28
Project 3 = 00:41:20
Project 2&3 Combined = 1:25:48
Project 1 took exactly 10 minutes longer to process than Project 2 and Project 3 combined.
So, while this does show that the smaller projects in this scenario do the initial calibration step of the processing about 10.44% more efficiently, does it save us any time?
Well, to answer that we need to now merge Project 2 and Project 3 together and account for the time this takes for the merge.

Pix4D Matic - Merging Project 2 and Project 3
In this case, it took 00:05:02, 5 minutes and 2 seconds to merge the projects.
So subtracting the 5m2s from the 10 minutes means to total process to split the projects and merge was technically 00:04:58, 4 minutes 58 seconds faster than to run all 7571 images in Project 1 at once.
Conclusion
Based on our test using 7571, 45 MP images all calibrated with the same settings we find that there is a slight speed advanced (10.44%) for the calibration step alone, but when you calculate the extra time needed to merge the projects, there is only a savings of 4 minutes 58 seconds.
This does not include the other steps of creating multiple projects and ensuring the same images do not overlap in multiple projects.
Based on these findings we do not recommend splitting this scale of project into 2 projects.
For projects with high image count that require the same calibration settings, It is best to calibrate all images at once in one project.
The merging projects feature really shines when you are merging different flight path missions that require different calibration settings for optimal image calibration.